新聞&大事件
我們為世界創造精彩

-
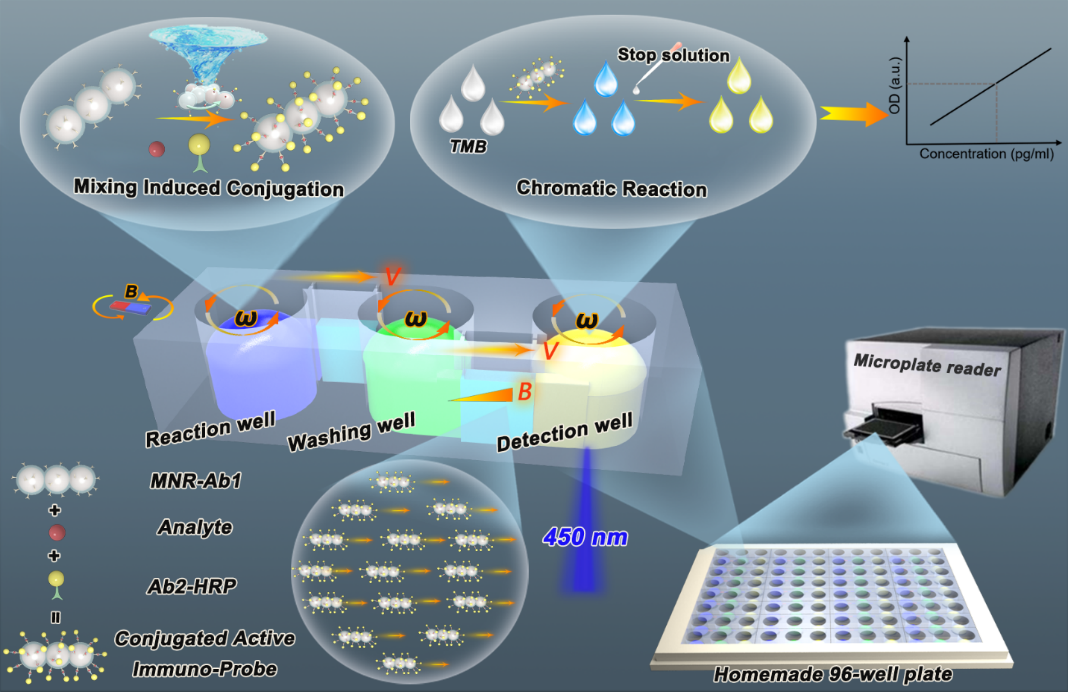
可操作的免疫分析探針磁性納米機器人用于自動化和高效的酶聯免疫吸附檢測
近日,哈爾濱工業大學馬星課題組提出了棒狀磁驅動納米機器人(MNR)作為可操作的免疫分析探針,實現自動高效的ELISA分析方法,稱為納米機器人激活ELISA(nR-ELISA)。
-

基于多模態聲驅微氣泡的多功能微對象操控研究
北京航空航天大學機械工程學院仿生與微納研究所馮林副教授等研發了一種基于聲驅微氣泡的模態可切換的多功能微操控系統,該系統能夠在微流控芯片內實現可控且高效的微對象運輸、三維旋轉和公轉等操控模式
-

基于微流循環腫瘤細胞無標記聲學分離的腫瘤術后評估
近日,北京航空航天大學機械工程學院仿生與微納研究所馮林副教授課題組利用聲波微流控從手術切除乳腺腫瘤小鼠全血中捕獲CTCs,建立一種簡單、快速、低成本的術后評價體系,并成功預測了腫瘤轉移。
-
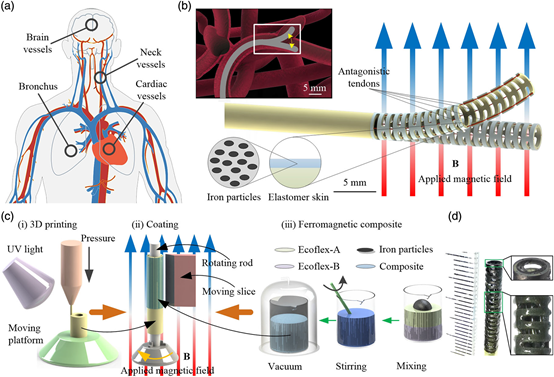
混合驅動軟連續體機器人實現大轉角和高精度操作
近日,香港城市大學生物醫學工程系申亞京教授帶領的研究團隊開發了一款毫米級的軟連續體機器人,其在線控和磁場的混合驅動模式下同時擁有大轉角和高精度操作能力。
-
樹蛙腳掌的多級微納界面濕增摩效應規律研究
北京航空航天大學陳華偉教授課題組,在江雷院士、雒建斌院士、張德遠教授等的指導下,表征了樹蛙腳掌表面的微納多級六棱柱及納凹坑結構,發現了生/機接觸過程中微納特征結構/材質協同作用下的兩種特殊液膜界面效應
-
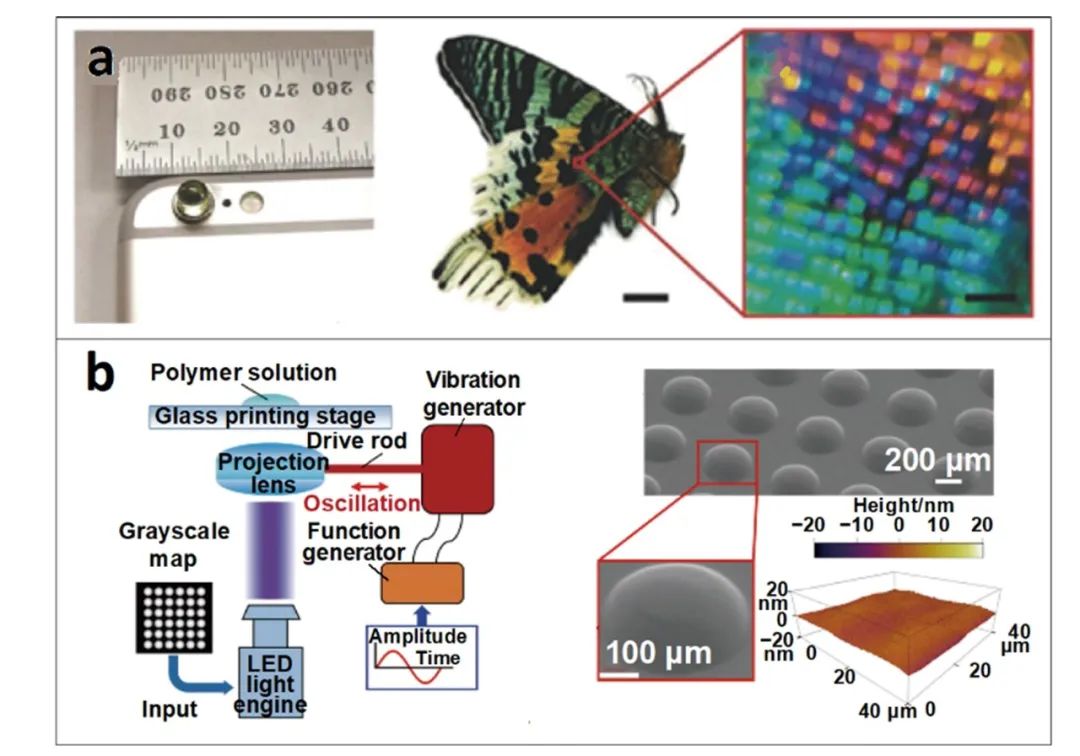
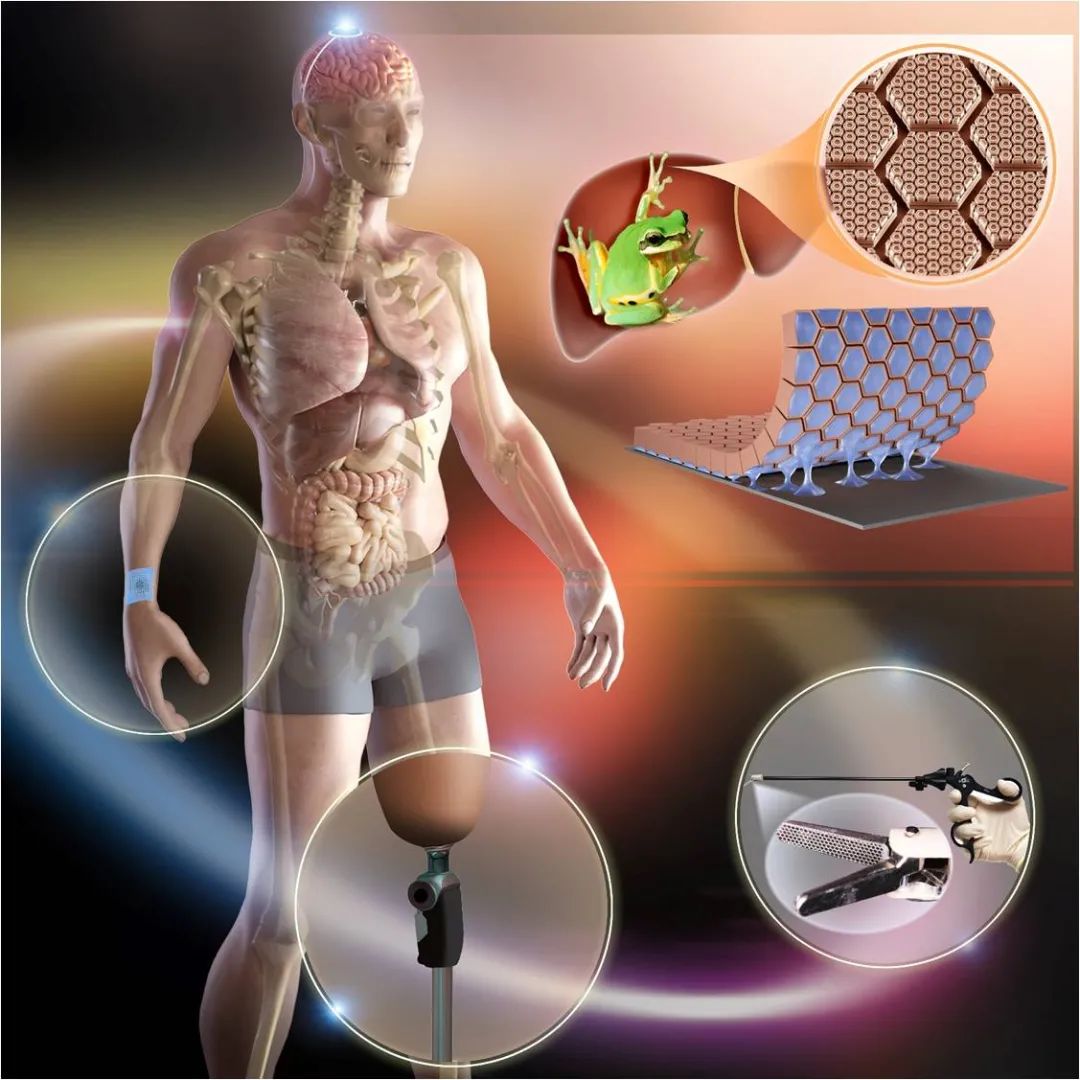
基于投影微立體光刻的3D打印技術及其應用
投影微立體光刻(Projection Micro Stereolithography – PμSL)是一種基于面投影光固化原理的高精度(最高可達0.6微米)增材制造(3D打印)技術。該技術可以用于制造具有跨尺度與多材料特性的高精度復雜三維結構,在力學超材料、光學器件、4D打印、仿生材料及生物醫學等領域具有廣闊的應用前景。
-
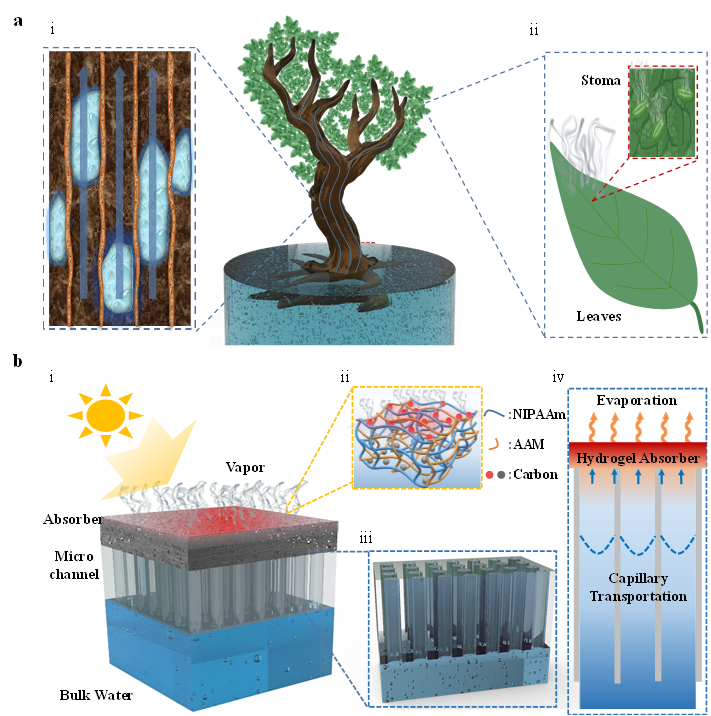
湖南大學王兆龍課題組:3D打印仿生太陽能蒸發器
湖南大學湖南大學王兆龍課題組利用摩方精密面投影微立體光刻3D打印技術(nanoArch P140高精度3D打印系統)制備了仿生微通道及水凝膠蒸發器樣品。
-
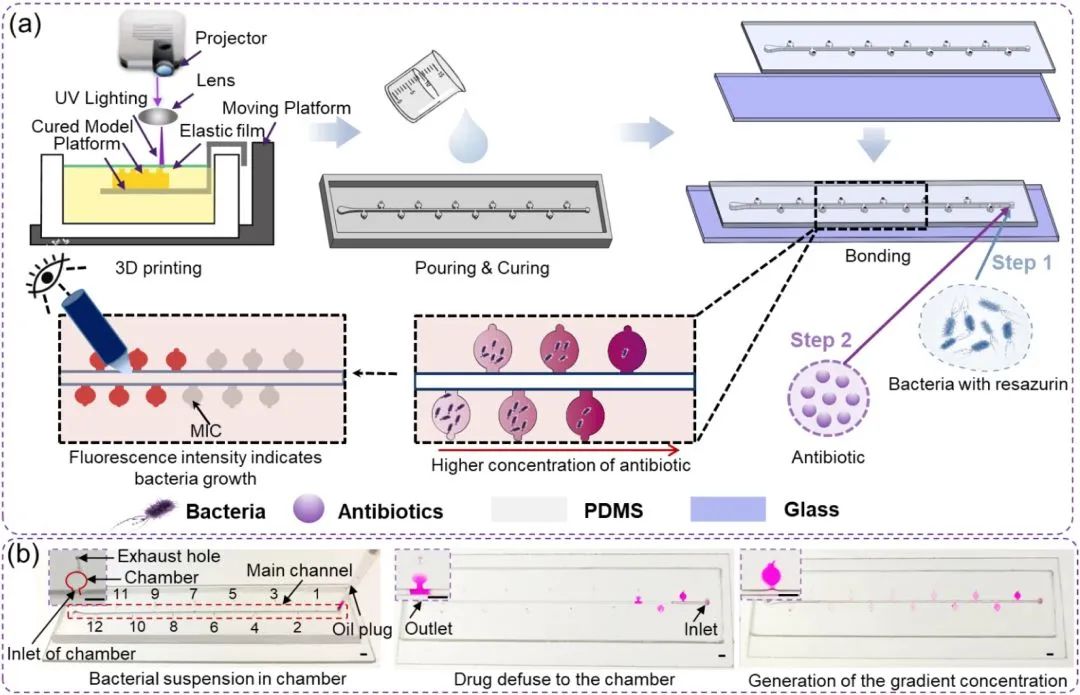
西湖大學鞠峰、周南嘉等 | 基于3D打印的濃度梯度微流控芯片用于微生物的快速藥敏檢測
西湖大學鞠峰、周南嘉等研究團隊設計了基于3D打印的濃度梯度微流控芯片,用于微生物的快速藥敏檢測。