新聞&大事件
我們為世界創造精彩

-
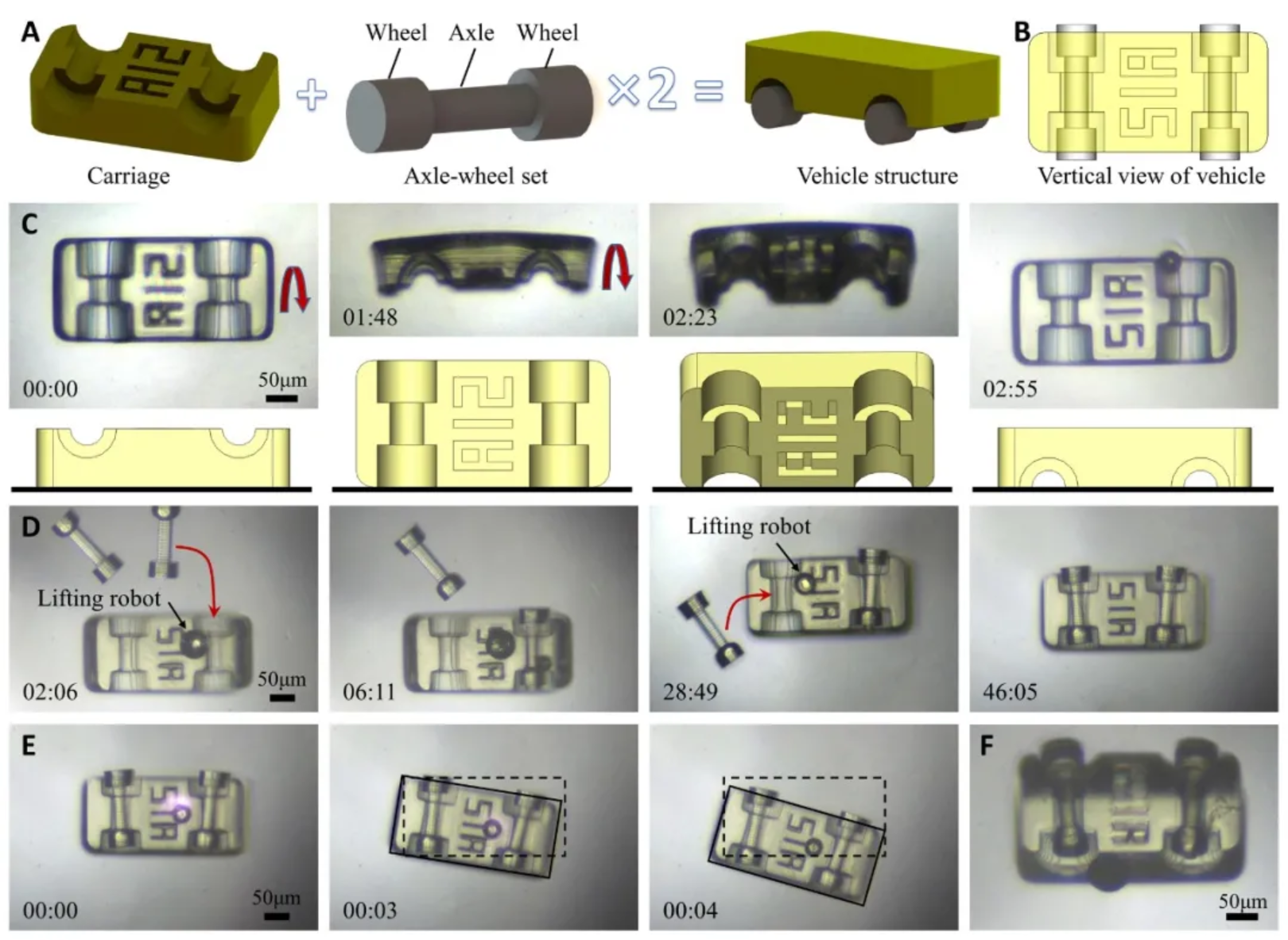
中科院沈陽自動化所劉連慶研究員課題組:利用氣泡作為微型機器人實現零件的操縱和裝配
中國科學院沈陽自動化研究所劉連慶研究員領導的微納米機器人課題組利用激光產生和控制的氣泡作為微型機器人,將不同形狀和功能的微小零件裝配在一起。
-
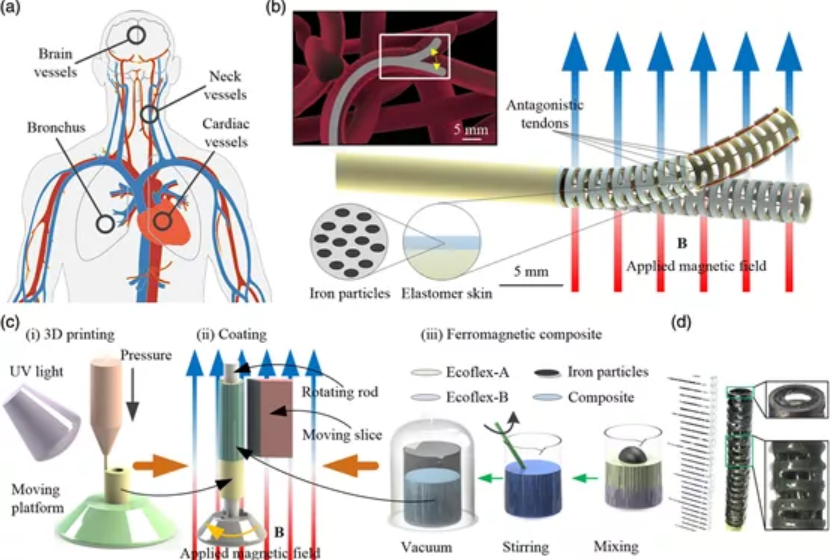
香港城大申亞京教授團隊《Advanced Intelligent Systems》:混合驅動軟連續體機器人實現大轉角和高精度操作
香港城市大學生物醫學工程系申亞京教授帶領的研究團隊開發了一款毫米級的軟連續體機器人,其在線控和磁場的混合驅動模式下同時擁有大轉角和高精度操作能力。
-

微型尖銳結構在聲場激勵下實現聲流體芯片上非接觸、無損傷細胞搬運及三維旋轉操作
北京航空航天大學機械工程及自動化學院馮林教授課題組學生宋斌,近日在國際期刊《Biomicrofluidics》發表了一篇文章“On-chiprotational manipulation of microbeads and oocytes using acoustic microstreaming generated by oscillating asymmetrical microstructures”。
-
具有不同表面潤濕性的微尺度3D打印微流控器件
阿聯酋Khalifa University的T.J. Zhang教授和Hongxia Li博士,近日在知名期刊《Soft Matter》發表了一篇高質量文章“Imaging and Characterizing Fluid Invasion in Micro-3D Printed PorousDevices with Variable Surface Wettability” 。研究人員在實驗過程中使用微納 3D打印設備,該設備具有2μm分辨率,50mm*50mm的加工幅面,加工微流控器件。這臺設備來自深圳摩方材料公司,型號為nanoArch S130。基于微納3D打印的微流控器件,結合多相流成像技術,研究微尺度多孔介質中的多相流動。
-

基于PμSL 微尺度3D打印的三維微柱陣列電極
-

Nano Energy:基于面投影微立體光刻3D打印技術的共形壓電傳感器設計與制造
近日,西安交通大學機械工程學院陳小明、李寶童、邵金友教授等研究人員,從功能壓電納米復合材料的改性與壓電器件的微結構拓撲優化等兩方面出發,利用面投影微立體光刻3D打印技術(nanoArch S140,10μm精度,深圳摩方),通過設計并調節壓電氮化硼納米管材料(BNNTs)和光敏聚合物樹脂的界面相容性,結合拓撲優化微結構方法,實現了具有高靈敏度、寬響應,且結構可覆形的柔性壓電傳感器制造。
-

基于樹蛙腳掌的多級微納界面功能化專題,專訪北京航空航天大學陳華偉教授課題組
北京航空航天大學陳華偉教授課題組近期在《Advanced Science》發布最新研究成果“Micro–Nano Hierarchical Structure Enhanced Strong Wet Friction Surface Inspired by Tree Frogs”
-

《Soft Matter》:利用微尺度3D打印和礦物涂層技術助力功能性微流控研究
近年來,高精度3D打印技術的迅速發展使得復現這種復雜的多孔結構變得可能。